This page is a sub-page of our page on Linear Transformations.
///////
Related KMR-pages:
• Mathematics is Representation
• Representation and Reconstruction of Vectors
///////
Other relevant sources of information:
///////
Representation and Reconstruction of a Presentant with respect to a Background
Representation: \, [ \, p_{resentant} \, ]_{B_{ackground}} \, \mapsto \, \left< \, r_{epresentant} \, \right>_{B_{ackground}}
Reconstruction: \, \left( \, \left< \, r_{epresentant} \, \right>_{B_{ackground}} \, \right)_{B_{ackground}} \mapsto \,\, p_{resentant}
/////// In Swedish:
Representation och Rekonstruktion av en Presentant med avseende på en Bakgrund
Representation: \, [ \, p_{resentant} \, ]_{B_{akgrund}} \, \mapsto \, \left< \, r_{epresentant} \, \right>_{B_{akgrund}}
Rekonstruktion: \, \left( \, \left< \, r_{epresentant} \, \right>_{B_{akgrund}} \, \right)_{B_{akgrund}} \mapsto \,\, p_{resentant}
/////// Back to English:
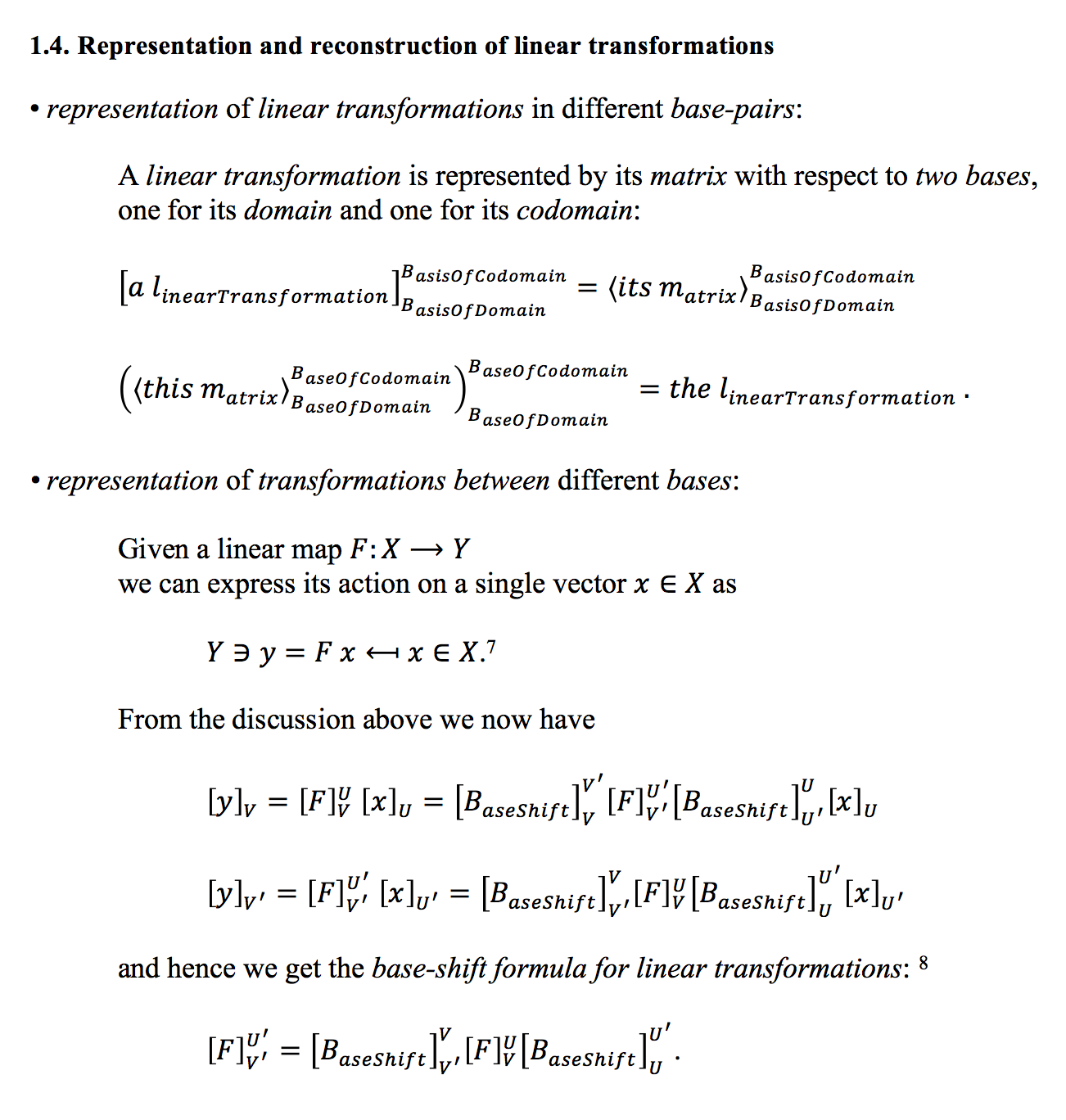
Representation and Reconstruction of a Linear Transformation
with respect to a Basis for its Domain and and a Basis for its Codomain:
Representation: [ \,\, a \, l_{inearMap} \, ]_{a \, B_{asisForItsCodomain}}^{a \, B_{asisForItsDomain}} \, \mapsto \, \left< \, a \, m_{atrix} \, \right>_{a \, B_{asisForItsCodomain}}^{a \, B_{asisForItsDomain}}
Reconstruction: \left( \, \left< \, t_{he} \, m_{atrix} \, \right>_{t_{he} \, B_{asisForItsCodomain}}^{t_{he} \, B_{asisForItsDomain}} \, \right)_{t_{he} \, B_{asisForItsCodomain}}^{t_{he} \, B_{asisForItsDomain}} \, \mapsto \, t_{he} \, l_{inearMap}
Normally the pronouns (‘a’ and ‘the’) are not explicitely written into the formulas but are implicitly understood through the repetition of the corresponding variable names. Following this notational convention the formulas would look like this:
Representation: [ \, l_{inearMap} \, ]_{\, B_{asisOfCodomain}}^{\, B_{asisOfDomain}} \, \mapsto \, \left< \, m_{atrix} \, \right>_{B_{asisOfCodomain}}^{B_{asisOfDomain}} .
Reconstruction: \left( \, \left< \, m_{atrix} \, \right>_{B_{asisOfCodomain}}^{B_{asisOfDomain}} \, \right)_{B_{asisOfCodomain}}^{B_{asisOfDomain}} \, \mapsto \, l_{inearMap} .
///////
Let \, X \, and \, Y \, be two linear spaces with dimension \, m \, and \, n \, respectively.
Given a linear map \, F: X \rightarrow Y \, we will express its action on a vector \, x \in X \, as
\, Y \ni F(x) \leftarrow x \in X .
This reversal of direction in the visual representation of \, F \, is due to advantages in connecting smoothly with matrix algebra. These advantages will become apparent below.
Let \, U \, and \, V \, be two bases for the linear spaces \, X \, respectively \, Y .
Since both \, F : X \rightarrow Y \, and \, [\;\;]_V : Y \rightarrow \mathbb {R^n} \, are linear maps, we have
[F(x)]_V \equiv
\equiv [F(x_1 u_1 + \cdots + x_m u_m)]_V \equiv
\equiv [x_1 F(u_1) + \cdots + x_m F(u_m)]_V \equiv
\equiv x_1 [F(u_1)]_V + \cdots + x_m [F(u_m)]_V \, .
We can write this relationship in matrix form as:
[F(x)]_V \equiv \begin{bmatrix} | & & | \\ {[F(u_1)]}_V & \cdots & {[F(u_m)]}_V \\ | & & | \end{bmatrix} \begin{bmatrix} x_1 \\ \vdots \\ x_m \end{bmatrix} \equiv \begin{bmatrix} | & & | \\ {[F(u_1)]}_V & \cdots & {[F(u_m)]}_V \\ | & & | \end{bmatrix} [\, x \,]_U
The n \times m matrix
[\, F \,]_V^U \triangleq \begin{bmatrix} | & & | \\ {[F(u_1)]}_V & \cdots & {[F(u_m)]}_V \\ | & & | \end{bmatrix}
is called the matrix of the linear map \, F: X \rightarrow Y \,
expressed in the bases \, U \, for \, X \, and \, V for \, Y .
Using this notation we can express, in matrix form,
the action of the matrix A = [\, F \,]_V^U \, of the map \, F: X \rightarrow Y \,
on the coordinate-vector \, [x]_U \in \mathbb {R^m} \, of the vector \, x \in X \, as
[F(x)]_V \equiv [\, F \,]_V^U \, [\, x \,]_U \, .
///////
//////