This page is a sub-page of our page on Mathematical Concepts.
///////
Related KMR-pages:
• Mathematics is Representation
• Homology and Cohomology
• Quotients
• Topology
• Duality
• Dimension
• Entropy
• Uncertainty
• Oscar Reutersvärd
• M. C. Escher
• Category Theory
///////
Other relevant sources of information:
• Contour Integration
• Combinatorial Aspects of Clifford Algebra, by Lars Svensson and Ambjörn Naeve (2002), presented at the International Workshop on Applications of Geometric Algebra, Cambridge, 5-6 Sept. 2002.
//////
Homotopy = Equivalence in the fundamental group of curves on a point under continuous parametric transformations.
Homotopy of the ‘tailbites’ of the Midgaard Snake:
Characterizing (= describing the structure of) the different types of ‘tailbites’ that can be performed by the Midgaard Snake in a given type of world.
The Midgaard Snake is called Jörmungandr in ancient Norse mythology.
/////// Quoting The Secret Teachings of All Ages,
by Manly P. Hall, The Philosophical Research Society Inc., 1977 (1927), p. CCIII:
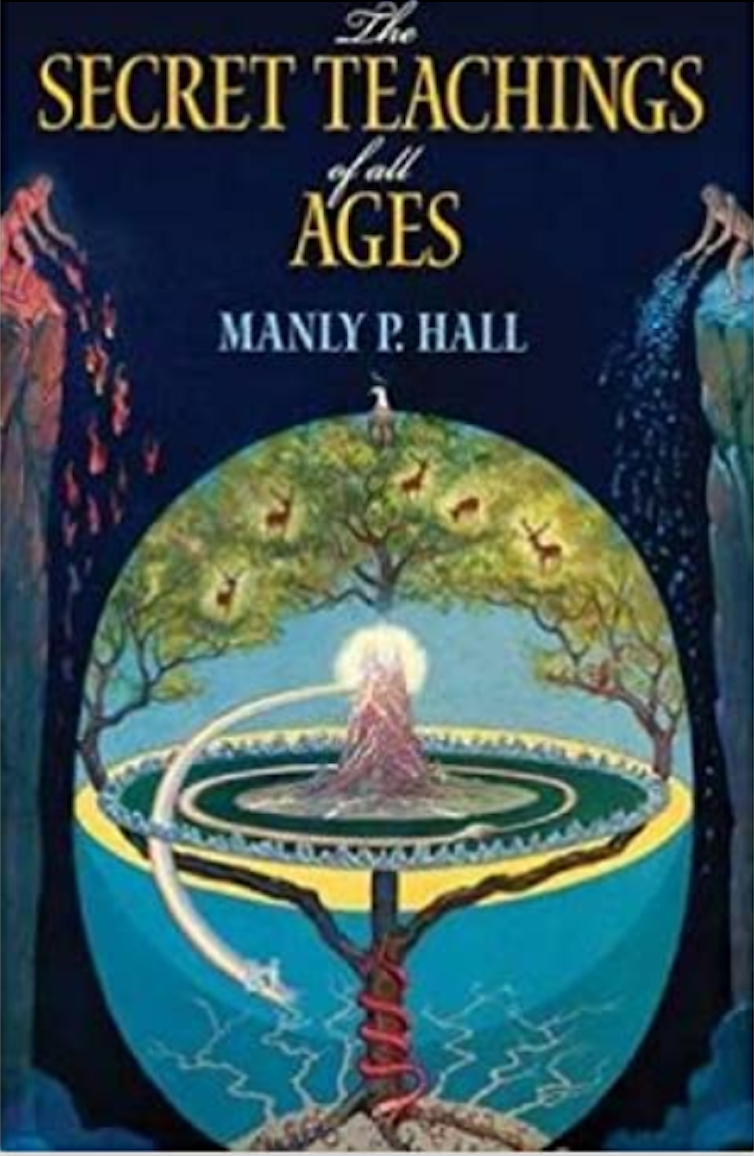
In Ginnungagap, the great cleft in space, All-Father created the huge world ash tree – Yggdrasil – the symbol of Life, Time, and Destiny. The three roots of the tree are called the spiritual, the terrestrial, and the infernal. They signify respectively spirit, organization and matter, according to Clement Shaw. The spiritual root has its source in Asgard, the home of the Æsir, or gods, and is watered by the Urdar fountain; the terrestrial root has its source in Midgard, the abode of men, and is watered by Mimir‘s well; the infernal root has its source in Nifl-heim, the abode of the dead, and is watered by the spring of Hvergelmir.
The three branches of the tree support Midgard, or the earth, in the midst of which rises the sacred mountain upon whose summit stands the city of the gods. In the great see surrounding the earth is Jörmungandr, the Midgard snake, with its tail in its mouth.
Bounding the sea is the wall of cliffs and ice fashioned from Ymir‘s eyebrows. The home of the gods above is connected by the Bifröst bridge to the dwelling place of men and infernal creatures below. On the topmost branch of the tree – which is called Lerad, meaning peace-giver – sits a great eagle. Between the eyes of the eagle is the falcon, Vedfolnir, whose piercing glance notes all things taking place in the universe.
The never-withering green leaves of the divine tree serve as pasturage for Odin‘s goat, Heidrun, who supplies the drink of the gods. The stags – Dain, Dvalin, Duneyr, and Durathor – also graze upon the leaves of the tree, and from their horns drops honey dew upon the earth. Ratatoskr, the squirrel, is the embodiment of the spirit of gossip, and, running back and forth between the eagle above and Nidhug, the serpent below, seeks to stir up discord between them. In the world of darkness below, Nidhug continually gnaws at the roots of the divine tree. He is assisted by numerous worms, all realizing that if they can destroy the life of the tree the rule of the gods will cease. On either side of the great tree are the primordeal giants casting ice and flames into Ginnungagap.
/////// End of Quote from The Secret Teachings of All Ages
The Homotopy of Impossible Figures:
Two impossible figures
are considered equivalent
if they can be reciprocally connected
by a possible path.
///////
Classifying the relative validity of paths of linked information:
Representation: \, [ \, \mathrm{Lies} \, ]_{\, \mathrm{Truths}} \, \mapsto \, \left< \, \overset{\mathrm{Homotopic}}{\mathrm{Equivalence}} \, \right>_{\mathrm{Truths}} \,
Definition: Two lies \, L_1 \, and \, L_2 \, are equivalent if and only if
they can be transformed into each other by valid (= true) reasoning.
///////